")
")


Pojazd A-EVE (skrót Autonomous Electrical VEhicle) jest niewielkim elektrycznym pojazdem skonstruowanym przez firmę Aptiv (wcześniej Delphi). Na podstawie umowy o współpracy pomiędzy AGH w Krakowie a firmą Aptiv został on udostępniony/przekazany zespołowi badawczemu w celu zaprojektowani i zbudowania prototypowego pojazdu autonomicznego.
Opis konstrukcji mechanicznej i napędu
A-EVE jest jednoosobowym pojazdem o napędzie elektrycznym zasilanym z trzech szeregowo połączonych akumulatorów. Jako napęd zastosowano trójfazowy silnik elektryczny zamontowany na tylnej osi pojazdu. Skręcanie przednich kół realizowane jest w systemie drive by wire tj. odczyty ze zmiany obrotu kierownicy powodują obrót silnika z przekładnią liniową która to przekładnia skręca przednie koła o kąt proporcjonalny do kąta obrotu kierownicy (kinematyka ackermana). Dodatkowo w kierownicy zaimplementowany jest algorytm forece feedback dający wrażenie rzeczywistego układu skręcania oraz dzięki któremu położenie kierownicy, a co za tym i kół przednich, wraca do położenia zerowego. Pojazd A-EVE wyposażony jest w dwa niezależne układy hamulcowe. Pierwszy z nich to układ elektryczny (silniki elektryczny zaciskają szczęki hamulcowe na tylniej osi). Drugi z nich to układ hydrauliczny który hamuje tylko przednie koła. Obydwa układy są sterowanie poprzez pedał hamulca z tą różnicą, że sterowanie elektrycznym układem hamowania może też się odbywać za pomocą komputera (generując sygnał sterowania dla silników hamulca).
Parametry techniczne:
- długość 2.15 m
- szerokość 1.10 m
- wysokość 1.25 m
- zasilanie pakiet akumulatorów 36V (3x12V) 56 Ah AGM
- maksymalna prędkość 20 km/h
- maksymalny zasięg 5-20 km
- waga 350 kg.
Opis układu sterowania
W pojeździe A-EVE zastosowano dwupoziomowy układ sterowania który zawiera sterownik nadrzędny oraz sterownik podrzędny. Taka struktura układu sterowania pozwala na optymalny podział zadań realizowanych przez poszczególne sterowniki (sterownik nadrzędny ECU1 i sterownik podrzędny ECU2) a także zapewnia dużą swobodę w przypadku konieczności zmian w układzie sterowania.
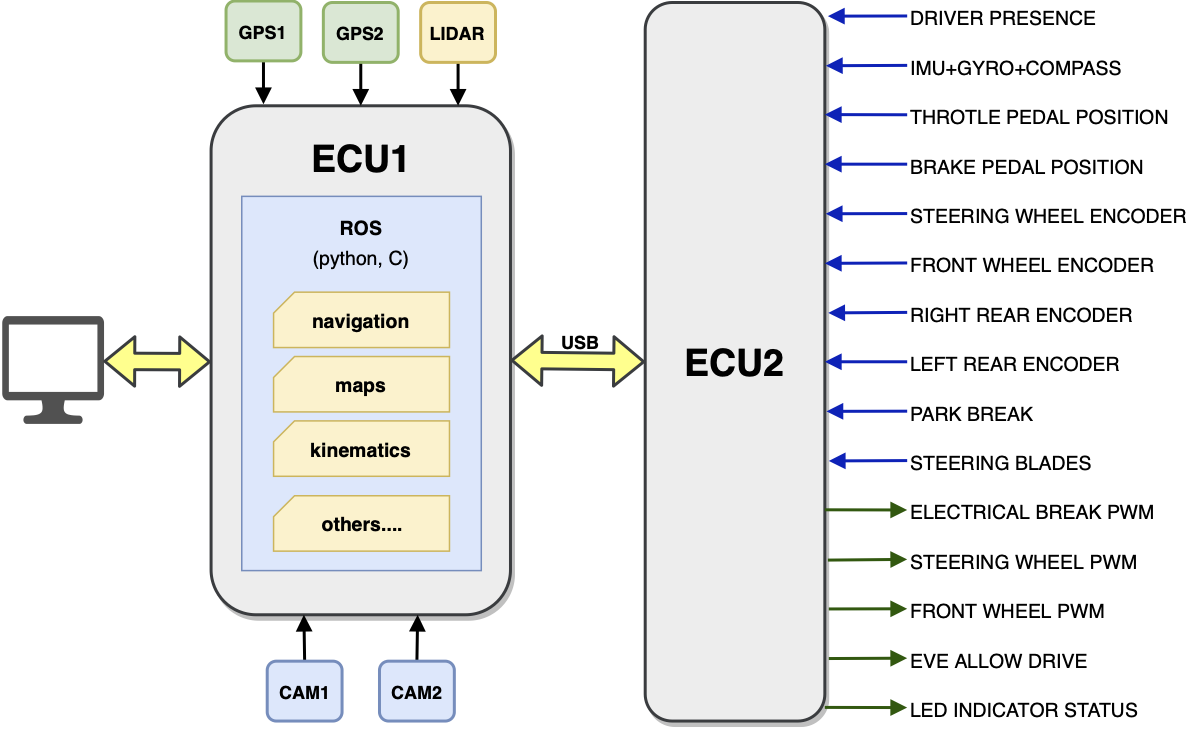
Schemat blokowy układu sterowania pojazdu A-EVE
Sterownik nadrzędny ECU1 komunikuje się ze sterownikiem podrzędnym ECU2 poprzez magistralę USB. Do sterownika nadrzędnego ECU1 podłączony jest również monitor LCD z dotykowym ekranem który służy do prezentowania aktualnego stanu pojazdu A-EVE oraz łatwego zarządzania. Sterownik ECU1, realizuje zadania sterowania wyższego rzędu takie jak wyznaczenie tras globalnych, wyznaczenie tras lokalnych, analiza danych z podłączonych sensorów takich jak kamery głębokości, LIDAR, GPS-y, implementacje różnego rodzaju algorytmów bezpieczeństwa np. awaryjne zatrzymywanie, omijanie przeszkód. W sterowniku ECU1 zaimplementowane są wszelkiego rodzaju zachowania “behawioralne” pojazdu A-EVE. Dodatkowo w warstwie sterowania nadrzędnego są implementowane systemy ADAS (Advanced Driver Assistance System), fuzji danych. Wszystkie dane sterujące wygenerowane przez sterownik ECU1 są przesyłane przez protokół USB-CDC do sterownika ECU2 np. zadana prędkość liniowa, zadany kąt skręcenia kół. Sterownik ECU2 odsyła do sterownika ECU1 dane niezbędne do działania algorytmów sterowania wyższych poziomów np. prędkość liniową, kąt skręcenia kierownicy. Algorytmy sterowania podrzędnego realizowane są przez dedykowany mikrokomputer wraz z odpowiednimi urządzeniami peryferyjnymi który został zaprojektowany i wykonany w ramach projektu inżynierskiego. Sterownik ECU2 realizuje proste/podstawowe algorytmy sterowania jak np. regulator prędkości, modelowanie dynamiki, regulator kąta skręcenia kół przednich w raz z regulatorem położenie kierownicy (system drive-by-wire oraz force-feedback). Sterownik ECU2 odpowiedzialny jest również z prawidłowy odczyt i przeliczanie danych z urządzeń takich jak: enkodery kół tylnich, enkoder kąta kierownicy, enkoder do pomiaru kąta skręcenia kół przednich, odczyt pozycji pedałów przyśpieszenia i hamowania, odczyt danych z czujnika obecności kierowcy. Do zadań sterownika ECU2 należy również generowanie poprawnych sygnałów sterowania typu PWM (np. do silnika głównego lub silnika kierownicy) oraz wysyłanie odczytanych danych do sterownika nadrzędnego ECU1.
Kinematyki
Układ skrętny pojazdu A-EVE jest identyczny jak w samochodach i wykorzystuje układ kinematyki ackermana \cite{rajamani2011vehicle}. Oznacza to, że do zmiany kierunku poruszania się pojazdu A-EVE konieczne jest skręcenie o pewien kąt kół przednich. Konsekwencją zastosowania takiego układu kinematycznego są różne prędkości kół podczas jazdy po łuku.
W symulacji wykorzystywano zredukowany model tzw. \emph{bicycle model} tj. nie modelujemy bezpośrednio ruch kół samochodu po jego obydwu stronach, a jedynie modelujemy zachowanie się pojedyńczej pary kół która jest umiejscowiona wzdłuż osi podłużnej samochodu w środku szerokości samochodu \cite{rajamani2011vehicle}.
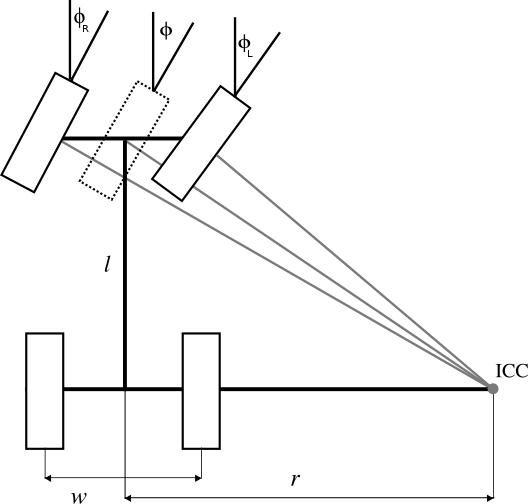
Schemat kinematyki Ackermana
Sensory
Kluczowymi elementami pojazdu A-EVE są sensory dzięki którym możliwe jest realizowanie algorytmów jazdy autonomicznej. W rzeczywistym świecie pomiary z sensorów obarczone są błędami. Błędy te mają różne źródła i mogą wynikać np. z budowy sensora, charakteru zjawisk fizycznych, wpływu innych elementów lub warunków dokonywania pomiarów. Chcąc w sposób wiarygodny testować algorytmy jazdy autonomicznej w środowisku wirtualnym należy dołożyć wszelkich starań aby modele sensorów wykorzystywane w symulacjach jak najwierniej odzwierciedlały rzeczywiste działanie sensorów. Pojazd A-EVE wyposażony jest w różnego rodzaju sensory które umożliwiają mu między innymi orientowanie się w przestrzeni co jest kluczowe we wszystkich algorytmach jazdy autonomicznej.
Podstawową funkcjonalnością pojazdu autonomicznych jest przemieszczanie się z punktu początkowego do końcowego. Zadnie to wymaga aby pojazdy autonomicznych były wyposażone w wiarygodnie i szybkie w działaniu systemu lokalizacji geograficznej. Na chwilę obecną nie istnieje jeden uniwersalny sensor który spełniał by powyższe założenia. W praktycznych rozwiązaniach stosuje się różnego typu sensory (GPS-y, akcelerometry, żyroskopy, magnetometry, enkodery) i wykorzystując algorytmy fuzji danych stara się ustalić pozycję samochodu z możliwie największą dokładnością. Do ustalenia swojej pozycji geograficznej pojazd A-EVE wykorzystuje trzy rodzaje sensorów: GPS, IMU oraz enkodery. Wszystkie te sensory są obarczone jakimś błędem działania. Chcąc więc wykorzystać wirtualne środowisko do opracowywanie i testowania algorytmów lokalizacji należy poznać i prawidłowo zamodoelować w środowisku wirtualnym działanie sensorów tak jak najwierniej przypomniało ono działanie rzeczywistych sensorów.














