
Autonomiczny robot PEPS jest specjalizowanym robotem skonstruowanym do badania samochodowych bezprzewodowych systemów kluczykowych. Uniwersalność konstrukcji sprawia, że może on zostać zaadoptowany bez problemu do realizacji innych zadań. Robot PEPES po wyznaczeniu obszaru w którym ma wykonywać pomiary zaczyna swoje działanie sam wyznacza trówymiarową siatkę pomiarową z zadanym krokiem i po koleji dokonuje pomiarów w każdym z punktów siatki. Wszystko dzieje samo, robota PEPS nie trzeba nadzorować!
Zalety robota
AUTONOMIA
Robot PEPS jest w pełni autonomicznym robotem który samodzielnie realizuje zadanie wykonania pomiarów. Po wskazaniu obszaru badań, robot PEPS samodzielnie wyznacza siatkę pomiarową (z zadaną dokładnością) i następnie przystępuje do wykonywanie badania. Robot PEPS jest bezpieczny dla otoczenia dzięki wbudowanych sensorom i algorytmom omija wykryte przeszkody.
ROS READY
Robot PEPS pracuje pod kontrolą ROS-a (Robot Operation System) najpopularniejszego obecnie oprogramowania wykorzystywanego do programowania robotów. ROS jest otwartym oprogramowaniem. Do robota PEPS można bardzo łatwo dodawać kolejne funkcjonalności lub też nowe urządzenia a dzięki wykorzystaniu ROS-a ich integracja jest bardzo prosta.
NAPĘD
Robot PEPS do poruszania wykorzystuje innowacyjny typ kół mecanum. Każde z kół posiada własny, niezależny napęd - dzięki temu robot PEPS może poruszać się we wszystkich kierunkach oraz obracać się wokół własnej osi.
SENSORY
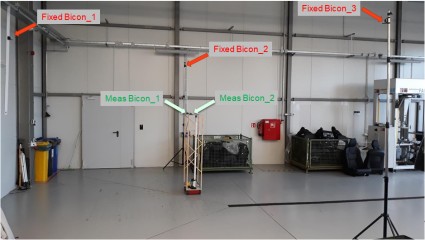
Robot PEPS wyposażony jest w dokładny lidar dzięki któremu potrafi precyzyjnie ustalać swoją pozycję i orientację w przestrzeni. Robot PEPS wyposażony jest również w 4 enkodery które dokładnie mierzą odległości jakie pokonały koła robota oraz jeden enkoder który wykorzystywany jest do ustalanie wysokości platformy pomiarowej.
KOMUNIKACJA
Sterowanie robotem PEPS odbywa się przy pomocy programu który jest uruchamiany na innym komputerze. Program umożliwia pełną kontrolę działania robota PEPS, konfigurację parametrów pracy a także zadawanie obszaru pomiarowego.




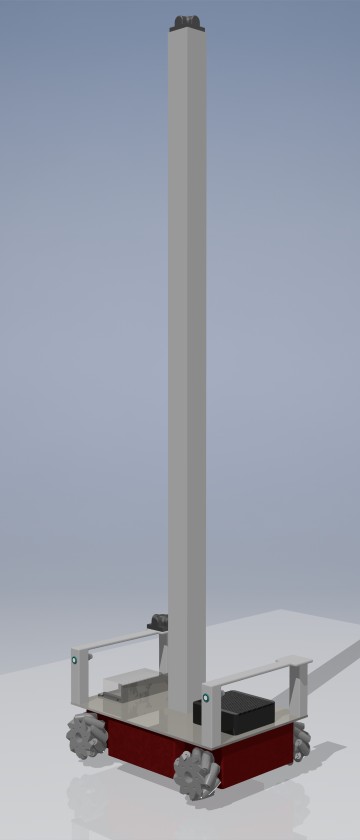


Specyfikacja techniczna
- wymiary: 450x330x1800 mm
- waga: 15kg
- prędkość: 0.7 m/s
- prędkość kątowa (obrót względem osi z): 210 stopnia/s
- zasilanie: akumulator 7.8Ah
- czas pracy: 5h
- sensory:
- lidar x 1
- enkodery x 4
- oprogramowanie: Ubuntu + ROS